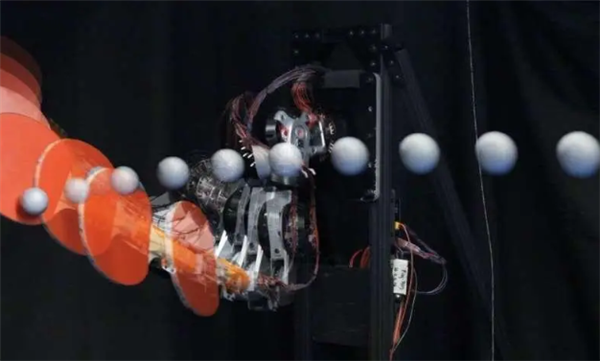


6月3日,快科技报道,麻省理工学院仿生机器人实验室近期在动态操控技术方面实现了显著进展,他们研发的乒乓球机器人系统表现出了与人类相近的精确击球技巧。
该研究团队由肯德里克·坎西奥及大卫·阮共同领导,他们所研发的系统将机械臂的硬件创新与高端控制算法完美结合。该系统运用了实验室独立研制的高性能人形机械臂,该机械臂以高扭矩和低惯性为特点,从而实现了毫秒级的迅速反应。
在算法领域,该研究团队成功突破了传统分段控制的限制,并巧妙地引入了全程轨迹规划的新技术,确保机械臂在挥拍的全过程中能够不断优化其运动轨迹。
该团队打造了一个包含感知单元与执行单元的完整系统结构。感知单元借助高速运动跟踪系统实时锁定球体动态,而执行单元则专注于制定最佳击球方案并对机械臂进行精确操控。根据测试结果,该系统能够以88%的准确率实现精准打击,其最高发射速度可达11米每秒,并且能够灵活转换不同的击球模式。
值得关注的是,这项研究在方法论层面具有显著价值。在强化学习盛行的当下,研究团队成功展示了传统约束优化方法在精密控制领域的独特优势。坎西奥指出:"我们正致力于研究两种方法优势的结合,这或许将催生出更为强大的控制模式。"
自去年九月研究成果公布之后,该团队不断对系统性能进行改良提升。其中,最新的成就涵盖了实现各个落点的精准操控,以及对球拍击球环节的细致调整。
在将来,科研团队打算增设龙门架等辅助结构来拓宽机械臂的操作范围,其长远目标在于达成人机对战的全能性。这项技术革新并不仅局限于乒乓球这一范畴,其核心算法与硬件创新有望被推广至搜救机器人、工业自动化等领域,这些场景对精密动态操控有较高要求。此举将为机器人技术的实际应用开辟新的路径,带来无限可能。